Calculus
Viviani’s curve with the TNB frame
Viviani’s curve describes the intersection of a sphere and cylinder, specifically $$(x-r)^2+y^2=r^2, \quad x^2+y^2+z^2=4r^2.$$ The intersection curve can be parametrized $$x = r(1+\cos t)$$ $$y= r\sin t$$ $$z=2r\sin(\frac{t}{2})$$
Visualizing a parametrically defined curve orthogonal to a surface
The curve $F$ is defined parametrically by $x(t) = \frac{2(t^3+2)}{3}$, $y(t) = 2t^2$, and $z(t) = 3t-2$. The surface $G$ is defined implicitly as $15 = x^2+2y^2+3z^2$. $F$ is perpendicular to $G$ at $P = (2,2,1)$. We can prove this by finding the gradient of the two functions; if the two functions are truly perpendicular at this point, then the gradients should simply by multiples of each other.
$$\nabla \vec{G}(t) = \langle 2t^2, 4t, 3\rangle$$
$$\nabla \vec{F}(x,y,z) = \langle 2x, 4y, 6z\rangle$$
At the point $P$, $t = 1$, so we can find the gradients at $P$:
$$\nabla \vec{G}(1) = \langle 2, 4, 3\rangle$$
$$\nabla \vec{F}(2,2,1) = \langle 4, 8, 6\rangle$$
Clearly, $\nabla \vec{G}(1) = 2\nabla \vec{F}(2,2,1)$, indicating these two gradients are in the same direction, and as such, the curve $F$ is perpendicular to the surface $G$ at $P$. This can be understandably difficult to reason, so the following visualization may help.
Newton’s method animation
Newton’s method animated to find the root of a function, $f(x)=x^3-2x^2-x+2$, with an initial estimate of $x = 0.15$.
$$ x_n = x_{n-1} - \frac{f(x_{n-1})}{f’(x_{n-1})} $$
Chain rule tree diagrams
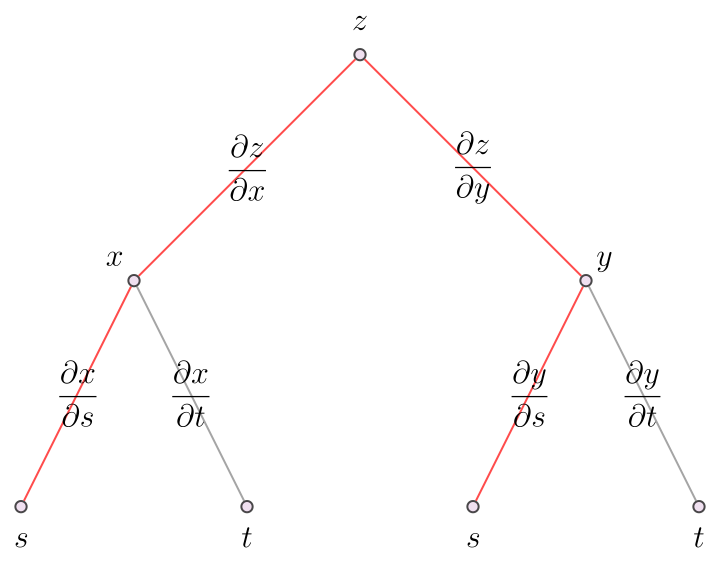
How I make trees to visualize the chain rule of derivatives (in Mathematica). I used the MaTeX package to render the labels as latex, but this could be replace with just normal text strings.
“The shark problem”
From the James Stewart Calculus book (pg. 985, no. 2).
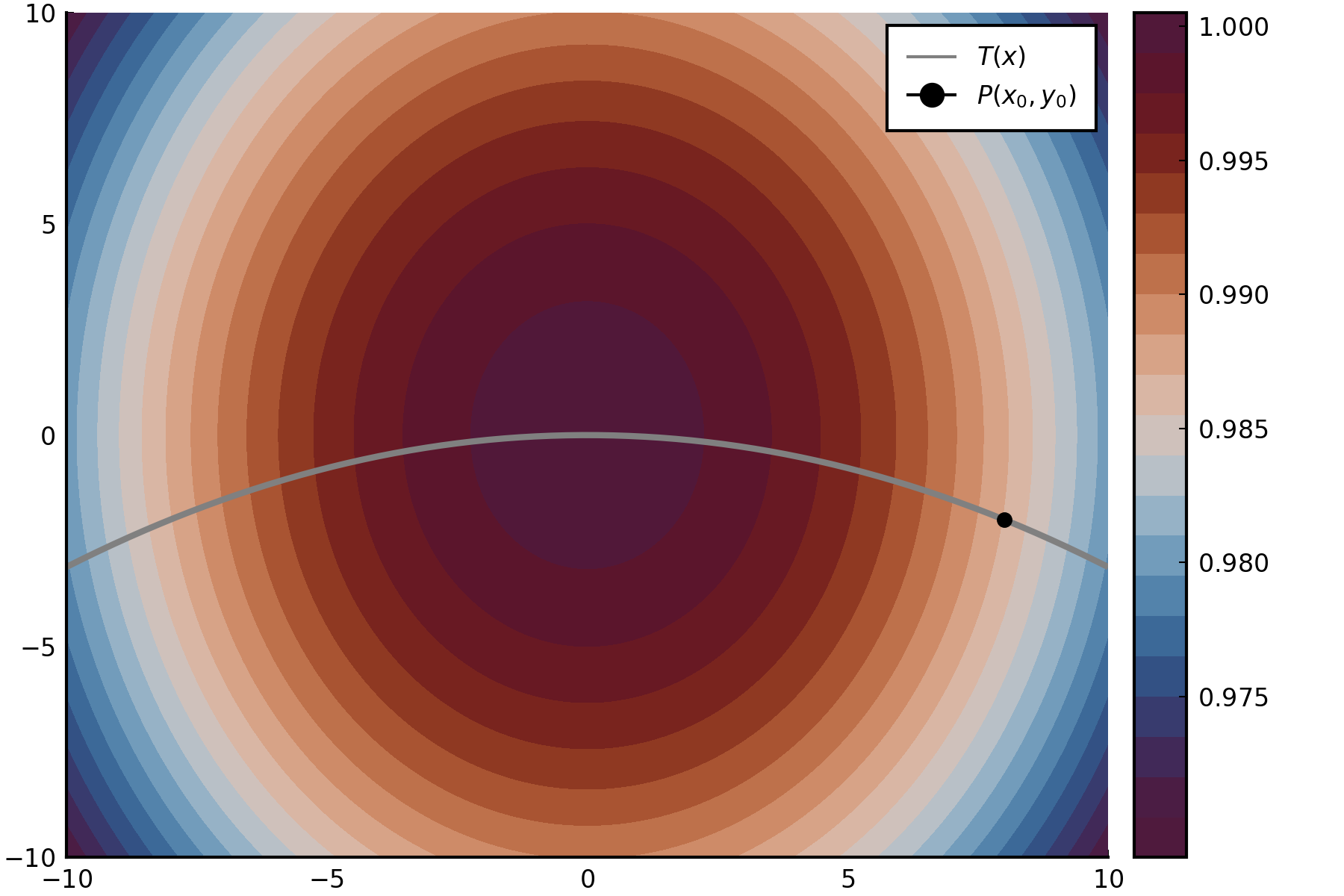
“Marine biologists have determined that when a shark detects the presence of blood in the water, it will swim in the direction in which the concentration of the blood increases most rapidly. Based on certain tests, the concentration of blood (in parts per million) at a point $P(x,y)$ on the surface of seawater is approximated by $$C(x,y) = e^{\frac{-(x^2+2y^2)}{10^4}}$$ where $x$ and $y$ are measured in meters in a rectangular coordinate system with the blood source at the origin.”
The graph below represents the situation, where $T(x)$ is the function of the direction that the shark will take given a particular starting point $P(x_0,y_0)$.
Tangent plane of a function of $x$ and $y$
Finding the tangent plane of: $$f(x,y) = 4x^2+4xy+y^2+2x+5y+3$$ at: $$(x_0,y_0,z_0) = (-3,1,27)$$
$$ t(x,y) - z_0 = \frac{\partial f}{\partial x}(x,y)(x-x_0) + \frac{\partial f}{\partial y}(x,y)(y-y_0) $$ $$t(x,y) = -18x-5y-22$$
Tangent plane of a parametric function
Given a sphere defined parametrically as a function $F(x,y,z)$:
$$x = r\cos\theta\sin\phi$$ $$y = r\cos\theta\cos\phi$$ $$z = r\sin\theta$$
where $r$ is the radius of the sphere, $\theta$ is the polar angle (along the $x-z$ plane), and $\phi$ is the azimuthal angle (along the $x-y$ plane). Since $x$, $y$, and $z$ are all functions of $\theta$ and $\phi$, we can define a vector function $G(\theta,\phi)$:
$$G(\theta,\phi) = \langle x(\theta,\phi), y(\theta,\phi), z(\theta,\phi)\rangle$$ $$=\langle r\cos\theta\sin\phi,\cos\theta\cos\phi,r\sin\theta \rangle$$
Taking the derivative of $G$ with respect to $\theta$ and $\phi$:
$$G_{\theta} = \langle -r\sin\theta\sin\phi, -r\sin\theta\cos\phi, r\cos\theta\rangle$$ $$G_{\phi} = \langle r\cos\theta\cos\phi, -r\cos\theta\sin\phi, 0\rangle$$
These functions represent vectors, clearly, and are tangent to the sphere at some point, say, $P(\theta_0, \phi_0)$. Intuitively, we can find the equation for a normal line to the sphere at $P$ by taking the cross product of $G_{\theta}$ and $G_{\phi}$, as this yields the vector normal to both:
$$G_{\perp} = G_{\theta}\times G_{\phi} = \langle r^2 \cos \theta \sin \theta \sin \phi, -r^2 \cos \theta \sin \theta \cos \phi, -r^2 \cos^2 \theta\rangle$$
The tangent plane to the sphere at $P$, intuitively, is also normal to this vector. Thus, we can find an equation for the plane by taking the dot product of the normal vector with the corresponding $(x_0,y_0,z_0)$ to $P$:
$$0 = G_{\perp} \cdot \langle x-x_0, y-y_0, z-z_0 \rangle$$
$$0 = r^2 \cos \theta \sin \theta \sin \phi (x-x_0) -r^2 \cos \theta \sin \theta \cos \phi (y-y_0) -r^2 \cos^2 \theta (z-z_0) $$
Rearranging for $z$ as a function of $x$ and $y$:
$$z = \frac{r^2 \cos \theta \sin \theta \sin \phi (x-x_0) -r^2 \cos \theta \sin \theta \cos \phi (y-y_0)}{r^2 \cos^2 \theta} -z_0 $$
For instance, take $P = (x,y,z) = (1,1,\sqrt{2})$. The tangent plane at this point, simplified:
$$z = \frac{1}{2}x + \frac{1}{2}y - \sqrt{2}$$
Coordinate Transformations Visualization
A nice Mathematica plot of a coordinate transformation.